Messprinzip digital
Die mechanische Dämpfung des Pendels erfolgt idealerweise durch Gase, im Normalfall durch Luft. Die Viskositätsänderung von Gasen im Temperaturbereich von -40° bis +70°C ist minimal, sodass die Dämpfung, im Gegensatz zu Flüssigkeiten, praktisch temperatur-unabhängig ist.
Die Optimierung der Dämpfung wird durch das Verhältnis der Pendelfläche zur Grösse der Schlitze der Archimedes-Spirale sichergestellt. Die mathematische Dämpfung erfolgt durch die Integration über Zeitintervalle und ist mit der Messzeit fast beliebig steuer- und verstellbar.
gallery
array(6 items)
position => array(3 items)
horizontal => "center" (6 chars)
vertical => "above" (5 chars)
noWrap => FALSE
width => 500 (double)
count => array(3 items)
files => 1 (integer)
columns => 1 (integer)
rows => 1 (integer)
columnSpacing => 10 (integer)
border => array(3 items)
enabled => FALSE
width => 2 (integer)
padding => 0 (integer)
rows => array(1 item)
1 => array(1 item)
columns => array(1 item)
1 => array(2 items)
media => TYPO3\CMS\Core\Resource\FileReference prototype object
propertiesOfFileReference => protected array(35 items)
uid => 2076 (integer)
pid => 34 (integer)
tstamp => 1435503373 (integer)
crdate => 1435503373 (integer)
cruser_id => 6 (integer)
sorting => 4 (integer)
deleted => 0 (integer)
hidden => 0 (integer)
t3ver_oid => 0 (integer)
t3ver_id => 0 (integer)
t3ver_wsid => 0 (integer)
t3ver_label => "" (0 chars)
t3ver_state => 0 (integer)
t3ver_stage => 0 (integer)
t3ver_count => 0 (integer)
t3ver_tstamp => 0 (integer)
t3ver_move_id => 0 (integer)
t3_origuid => 0 (integer)
sys_language_uid => 1 (integer)
l10n_parent => 0 (integer)
l10n_diffsource => "a:8:{s:5:"title";N;s:11:"alternative";N;s:4:"link";N;s:11:"description";N;s:
9:"uid_local";N;s:6:"hidden";N;s:16:"sys_language_uid";N;s:11:"l10n_parent";
N;}" (155 chars)
uid_local => 3183 (integer)
uid_foreign => 3002 (integer)
tablenames => "tt_content" (10 chars)
fieldname => "image" (5 chars)
sorting_foreign => 2 (integer)
table_local => "sys_file" (8 chars)
title => NULL
description => NULL
alternative => NULL
link => "" (0 chars)
showinpreview => 0 (integer)
crop => "" (0 chars)
autoplay => 0 (integer)
l10n_state => NULL
name => protected NULL
originalFile => protected TYPO3\CMS\Core\Resource\File prototype object
updatedProperties => protected array(empty) max depth
metaDataAspect => private TYPO3\CMS\Core\Resource\MetaDataAspect prototype object max depth (26 items)
properties => protected array(15 items) max depth
storage => protected TYPO3\CMS\Core\Resource\ResourceStorage prototype object max depth
identifier => protected "/img/applications/digital_2007.png" (34 chars)
name => protected "digital_2007.png" (16 chars)
deleted => protected FALSE
mergedProperties => protected array(53 items)
uid => 2076 (integer)
pid => 34 (integer)
tstamp => 1435503373 (integer)
crdate => 1435503373 (integer)
cruser_id => 6 (integer)
sorting => 4 (integer)
deleted => 0 (integer)
hidden => 0 (integer)
t3ver_oid => 0 (integer)
t3ver_id => 0 (integer)
t3ver_wsid => 0 (integer)
t3ver_label => "" (0 chars)
t3ver_state => 0 (integer)
t3ver_stage => 0 (integer)
t3ver_count => 0 (integer)
t3ver_tstamp => 0 (integer)
t3ver_move_id => 0 (integer)
t3_origuid => 0 (integer)
sys_language_uid => 1 (integer)
l10n_parent => 0 (integer)
l10n_diffsource => "a:8:{s:5:"title";N;s:11:"alternative";N;s:4:"link";N;s:11:"description";N;s:
9:"uid_local";N;s:6:"hidden";N;s:16:"sys_language_uid";N;s:11:"l10n_parent";
N;}" (155 chars)
uid_local => 3183 (integer)
uid_foreign => 3002 (integer)
tablenames => "tt_content" (10 chars)
fieldname => "image" (5 chars)
sorting_foreign => 2 (integer)
table_local => "sys_file" (8 chars)
title => NULL
description => NULL
alternative => NULL
link => "" (0 chars)
showinpreview => 0 (integer)
crop => "" (0 chars)
autoplay => 0 (integer)
l10n_state => NULL
missing => 0 (integer)
type => "2" (1 chars)
storage => 1 (integer)
identifier => "/img/applications/digital_2007.png" (34 chars)
identifier_hash => "22130b81be02f0b58e67866125bca9a364746cc4" (40 chars)
extension => "png" (3 chars)
mime_type => "image/png" (9 chars)
name => "digital_2007.png" (16 chars)
sha1 => "8b2ace8d6dbc8bb42312dae8ea8c9767437b9f5b" (40 chars)
size => 92441 (integer)
creation_date => 1435503104 (integer)
modification_date => 1435503104 (integer)
folder_hash => "e39b4b9c3f6f32ca4a099761f478de941375a8c1" (40 chars)
file => 3183 (integer)
width => 1000 (integer)
height => 576 (integer)
categories => 0 (integer)
metadata_uid => 3027 (integer)
dimensions => array(2 items)
width => 500 (double)
height => 288 (double)
columnIterator
array(7 items)
index => 0 (integer)
cycle => 1 (integer)
total => 1 (integer)
isFirst => TRUE
isLast => TRUE
isEven => FALSE
isOdd => TRUE
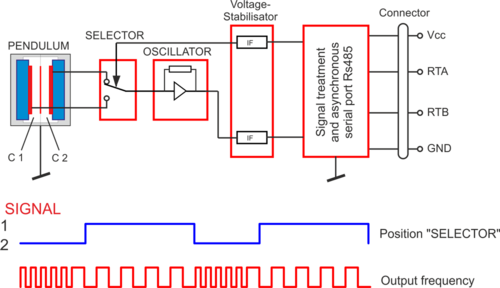
Entsprechend der jeweils aktiven Elektrode erzeugt ein RC-Oszillator eine der Elektroden-Pendel-Kapazität entsprechende Frequenz im Bereich von 250.000 bis 350.000 Hz. Durch eine alternierende Zuschaltung der beiden Elektroden an den Oszillator über einen Selector wird sichergestellt, dass durch den Einsatz von nur einem Oszillator die Temperatur einen relativ geringen Einfluss hat. Diese Konfiguration zeigte sich hinsichtlich Langzeitstabilität gegenüber herkömmlichen Methoden als ideal. Durch die Anordnung des Oszillatoren in unmittelbarer Nähe der Elektroden tragen die sehr kurzen und stabilen Verbindungen zu den ausge-zeichneten Eigenschaften bei.
Der Frequenz-Hub von ca. 100'000 Hz, entsprechend 100'000 Messeinheiten, ist dafür verantwortlich, dass auch bei hohen Messraten (Anzahl Messungen pro Sekunde) eine sehr gute Auflösung erzielt werden kann. Bisher stand üblicherweise am Ausgang eine Spannung von ± 2 Volt zur Verfügung. Der daraus resultierende Messbereich von ±2000 Einheiten war speziell für grössere Neigungsbereiche hinsichtlich Auflösung nicht ausreichend. Dank der Möglichkeit, die Sensoren mittels Stützpunktverfahren zu kalibrieren, lässt die Linearität auch bei grösseren Messbereichen keine Wünsche mehr offen.